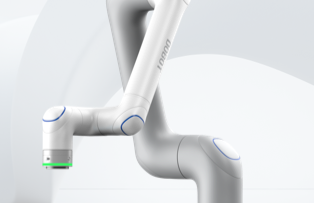

DOBOT CRASシリーズ
効率的で柔軟で使いやすい
CRAシリーズ(CRA3・5・10適応)を基に
Dobot SafeSkinを追加し、より効率的で安全な
人間とロボットの協働生産を実現します。
CRAシリーズ(CRA3・5・10適応)を基に
Dobot SafeSkinを追加し、より効率的で安全な
人間とロボットの協働生産を実現します。
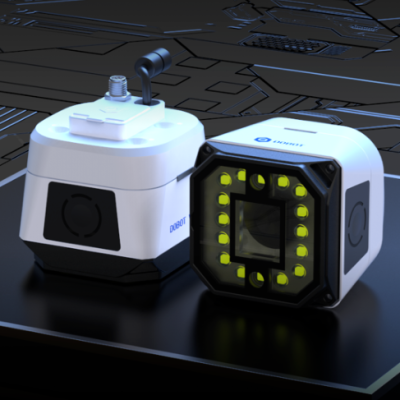
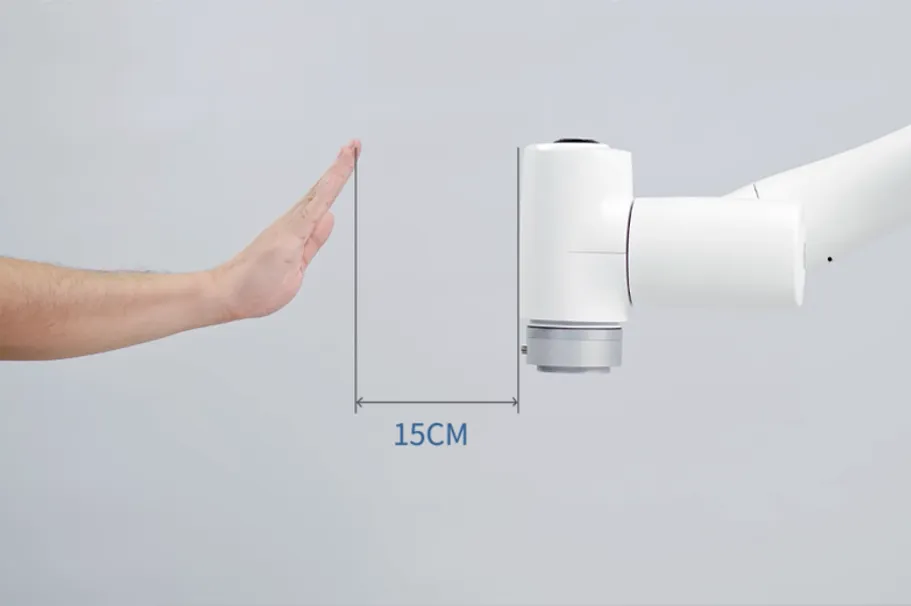
接触なく、より安全に
Dobot SafeSkinは、非接触型モニタリングと衝突回避を実現しながら、協働ロボットが、国際標準の4倍の1m/秒の速度で作業を行うことができ、衝突を防ぐために速度を下げる必要はありません。そのため、効率と安全性の両方を向上させます。

セーフスキンは、ロボットが15㎝範囲内の障害物をリアルタイムで感知し、360°全方位の衝突防止バリアを形成し、ロボットに追加の制動距離を作り出し、運転の安全を保証します。



| 項目 | CR3AS | CR5AS | CR10AS | |
|---|---|---|---|---|
| 本体重量 | 18.4kg | 26.6kg | 41.5kg | |
| 最大可搬重量 | 3kg | 5kg | 10kg | |
| 動作半径 | 620mm | 900mm | 1300mm | |
| 最大直線速度 | 2m/秒 | |||
| 関節の可動範囲 | J1 | ±360° | ||
| J2 | ±360° | |||
| J3 | ±155° | ±160° | ±160° | |
| J4 | ±360° | |||
| J5 | ±360° | |||
| J6 | ±360° | |||
| 関節の最大速度 | J1 | 180°/秒 | 180°/秒 | 150°/秒 |
| J2 | 180°/秒 | 180°/秒 | 150°/秒 | |
| J3 | 223°/秒 | 180°/秒 | 180°/秒 | |
| J4/J5/J6 | 223°/秒 | |||
| 先端I/O | DI | 2チャンネル | ||
| DO | 2チャンネル | |||
| AI | 2チャンネル | |||
| 通信インターフェース | RS485 | |||
| 繰り返し精度 | ±0.02mm | ±0.02mm | ±0.03mm | |
| IP等級 | IP54 | |||
| 作業環境 | 0~50℃ | |||
| 消費電力 | 120W | 150W | 350W | |
| 本体からコントローラー間ケーブル | 5m | |||
| 材質 | アルミニウム合金、ABS樹脂 | |||
| 入力電源 | AC:100~240V、47~63Hz DC:30~60V |
|||
| コントローラI/O | DI/DO | 24チャンネル(NPNまたはPNP) | ||
| AI/AO | 2チャンネル、0~10V/4~20mA | |||
| 通信ポート | ネットワーク | 2個(TCP/IP、Modbus TCP、Ethernet/IP) | ||
| USB | 2個(ファイル入出力用) | |||
| RS485 | 1個(Modbus RTU通信用) | |||
| エンコーダー | 1個(ABZインクリメンタル用) | |||
| コントローラIP等級 | IP20(IP54選択可) | |||
| ティーチング方式 | PC、APP(Android)、ティーチングペンダント | |||
| 検知方式 | 近接および接触検知 |
| 対応対象物 | 人体、金属、液体など(※非導電性物質には効果が低下する場合があります) |
| 推奨設置位置 | J4、J5、J6軸 |
| 有効検知距離 | 5~15cm(設置条件により変動) |
| 検知サイクル時間 | 0.01秒 |
| 非常停止作動時間 | 0.1秒 |
お問い合わせ・ご購入はフレアオリジナルにて、お待ちしております。
お問い合わせ