


V4.x機能
V4.xシステムアーキテクチャでは、システムの安定性を強化し、協働ロボットのアプリケーションシナリオや機能設計により適合させるために調整が行われています。そのため、V3.xと比較すると使用上の違いが多くあります。
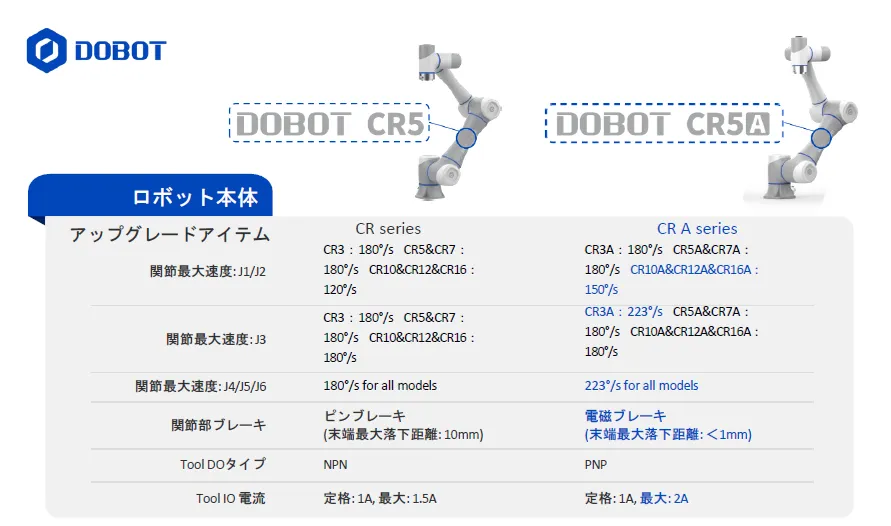
・工場出荷時の速度および加速度は、最適化された運動学および動力学アルゴリズムに基づき大幅に改善され、ロボットの動作がより速くなっています。
・リモートIOとリモートModbusステータスは削除され、ソフトウェア接続時にはIOおよびModbusトリガー機能が利用可能となっています。
・ポイント変数、動作、および関連コマンドが大幅に調整され、V3.xとの互換性がありません。
・ロボットのステータスインジケーターの色が調整され、ロボットの異なる状態をより迅速に識別できるようになっています。
CRA製品情報はこちら